新エネルギー・産業技術総合開発機構(NEDO)と画像検査装置のYOODS(ユーズ)は,小型・軽量・高精度でありながら,低価格を実現したロボットアーム用3Dビジョンセンサー「YCAM3D」を開発した(ニュースリリース)。
NEDOは,「ロボット活用型市場化適用技術開発プロジェクト」において,技術や価格,周辺環境などの課題により導入が進まなかった領域(ロボット未活用領域)に対し,これらの課題を解決することでロボットの導入促進を図ることを目的とした技術開発に取り組んでいる。
このようなロボット未活用領域の中で,産業用ロボットと3Dカメラを組み合わせたロボットピッキングは,労働人口の減少に対して日本が生産性を維持・強化していくために必須の自動化システムとなるが,従来の3Dビジョンセンサーはロボットの上部の天井などに設置する方式が主流であり,広い視野を一度に計測可能とするため高価で広い設置スペースが必要となり,その適用先が限定的となっている。
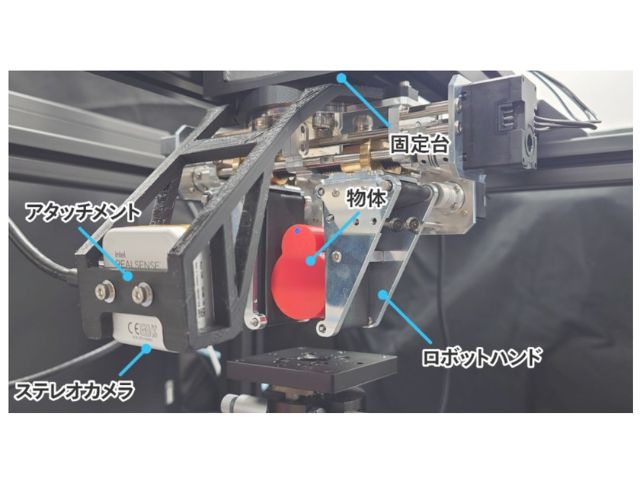
今回,研究グループが開発した同センサーは,独自の小型高出力プロジェクターの搭載と,ステレオ位相シフト方式(プロジェクターを用いた3次元計測方法の一種)を採用し,同方式の3Dビジョンセンサーでは世界最小・最軽量を実現したという。
ロボットアームに搭載するハンドアイ方式として,対象物に近づいて撮影することで,検出対象物の姿勢を±0.1mm以内の精度で認識することが可能であるとともに,データ量が少ない低解像度のカメラを使えることで,認識時間の高速化(従来の位相シフト方式3Dビジョンセンサーと比べて1/4~1/16)と低価格化(従来の位相シフト方式3Dビジョンセンサーと比べて約1/2)を実現する。
同センサーは,ハンドアイ方式によりカメラとロボット間の座標変換のキャリブレーション(補正)が容易となり,部品の位置と姿勢を高精度に認識してピッキングすることが可能になる。小型・軽量のため,ロボットアームと一体化したビジョンシステムを設計でき,ワークトレイなど周囲との干渉を少なくすることができる。
特に高精度な位置決めが必要な小型部品ピッキングや搬送位置決めの作業では,新たにビジョンセンサーを搭載したロボットの導入により,従来は人が担っていた作業領域の自動化への活路を開くとしている。YOODSは,同センサーを4月1日に販売開始する予定。初年度に国内で100台程度,中国を中心とした海外で50台程度の販売を目指す。