日立オートモティブシステムズは,大きな舵角旋回や急な舵角操作が求められる場面において,ステレオカメラやレーダーがセンシングした情報によりAD/ADAS(自動運転/先進運転支援システム)ECU(電子制御ユニット)が指示する軌道を正確に追従走行するための車両制御技術を開発した(ニュースリリース)。
一般道において自動運転車両が走行する場合,高速道路と違い,狭く入り組んだ路地やショッピングセンターなどの駐車場のような内輪差が大きく小回りをする走行に加えて,自車以外の車両のほか歩行者などさまざまな移動対象,さらに進行方向上の落下物などを回避する走行が必要になる。
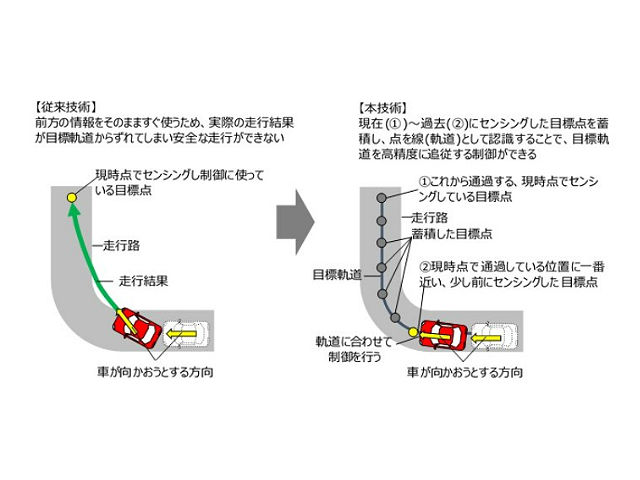
しかし,このような走行において大きな舵角旋回や急な舵角操作が求められる操作シーンでは,センシングした前方の情報に基づいて車両制御しても,実際の走行結果が目標となる軌道からずれてしまい安全な走行ができないことが課題だった。
今回の技術では,前方のセンシング情報をそのまますぐに使うのではなく,ECU内に一旦蓄積してから使うことで過去から現在までの点を線(軌道)として認識し,目標となる軌道を高精度に追従できるようにした。
加えて,これまで,目標軌道に合わせてアクチュエーターを動かそうとすると,一般的にアクチュエーターや車両が応答するまでの遅れによって,軌道追従の精度が下がったり車両制御の安定性が損なわれたりする問題があった。
同社の今回の技術では,ECU内で車両運動の予測シミュレーションを行ない,アクチュエーターや車両の応答を予測しているため,応答遅れに対して補正を行ない,軌道追従の精度をさらに高めているとしている。