 新エネルギー・産業技術総合開発機構(NEDO)と東京工業大学の研究グループは,DNAオリガミ(DNAを素材とした2次元または3次元の人工物)で構成されるナノスケール構造体を仮想現実(VR)上の仮想分子として表現し,手で操作できるネットワーク型VR環境を開発した(ニュースリリース)。
新エネルギー・産業技術総合開発機構(NEDO)と東京工業大学の研究グループは,DNAオリガミ(DNAを素材とした2次元または3次元の人工物)で構成されるナノスケール構造体を仮想現実(VR)上の仮想分子として表現し,手で操作できるネットワーク型VR環境を開発した(ニュースリリース)。
DNAオリガミで構成されるナノスケール構造体をVR環境で実現するためには,1秒間に90フレーム以上のVR表示と大規模なVRシミュレーションを同時に実現する必要があり,高速な計算処理が必要となる。
この研究では,VRの表示と操作を行なうVRクライアントコンピューターとVRシミュレーションを実行するVRサーバーコンピューターを10Gb/sの転送速度を持つ高速ネットワークで結合したネットワーク型VR環境を構築した。複数のGPUを用いたVRサーバーコンピューターを用いることにより,DNAオリガミのように40万原子を超すようなナノスケール構造体をVR上でシミュレーションすることが可能となった。
分子人工筋肉では,微小管やDNAオリガミで構成されるナノスケール構造体を構築し,分子モーターを使って分子部品を動かすことで筋肉のような収縮運動を実現している。従来,ナノスケール構造体は研究者が実験的にしか作成することができなかったため,開発に数ヶ月単位の時間がかかっていた。
この研究では,DNAオリガミのモデルをVR上に仮想分子として再現することで,DNAオリガミの詳細な構造を手で確かめながら設計することが可能となった。
前述したネットワーク型VR環境を用いると,大規模VRシミュレーションは可能となるが,VRサーバーコンピューターとVRクライアントコンピューターの間にネットワークの遅延が生じる。VR環境では,通常,遅延が0.03秒を超えると利用者に違和感が生じ,VR酔いが発生すると言われている。
この研究では,AIの深層学習技術を用いて利用者の手の動きを予測し,予測結果に基づいて遠隔のサーバーコンピューター上にある仮想ハンドを動かすことにより,遅延を解消した。
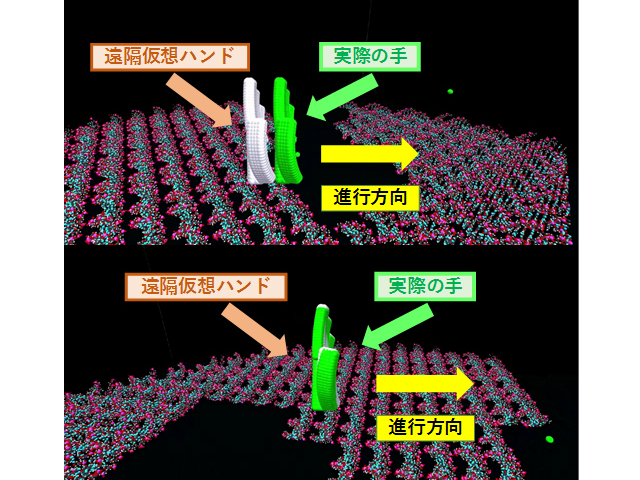
画像に示すように,通常は,実際の手(緑)より遅れて遠隔仮想ハンド(白)が動くため違和感が生じる(上図)。一方,AI予測制御を用いると実際の手の動き(緑)と遠隔仮想ハンドの動き(白)が一致するため違和感なく操作ができる(下図)。
この研究成果は,実際には目で見ることができない微小管やDNAオリガミなどを用いた新しい分子人工筋肉やドラッグデリバリーシステムなど創薬の研究開発に応用できるほか,クラウドを用いたVRゲームの開発やロボットの遠隔操作への応用も期待されるとしている。