 東陽テクニカは,IMU(慣性計測装置)で得られた加速度データから人間と自動車の移動軌跡を算出し,両者の位置関係を特定するための解析方法について,2020年4月8日に特許を取得した(ニュースリリース)。
東陽テクニカは,IMU(慣性計測装置)で得られた加速度データから人間と自動車の移動軌跡を算出し,両者の位置関係を特定するための解析方法について,2020年4月8日に特許を取得した(ニュースリリース)。
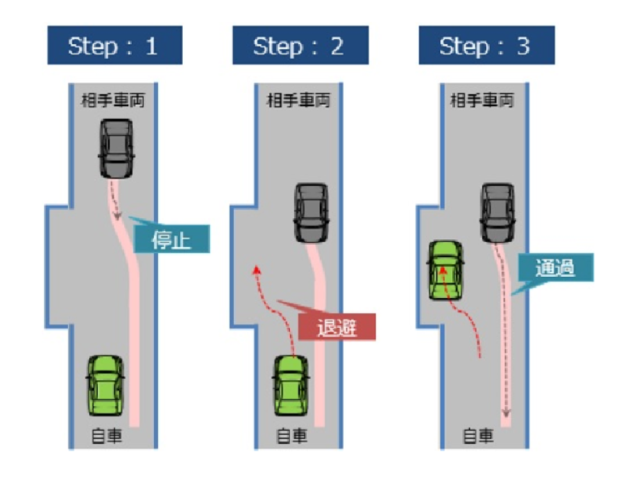
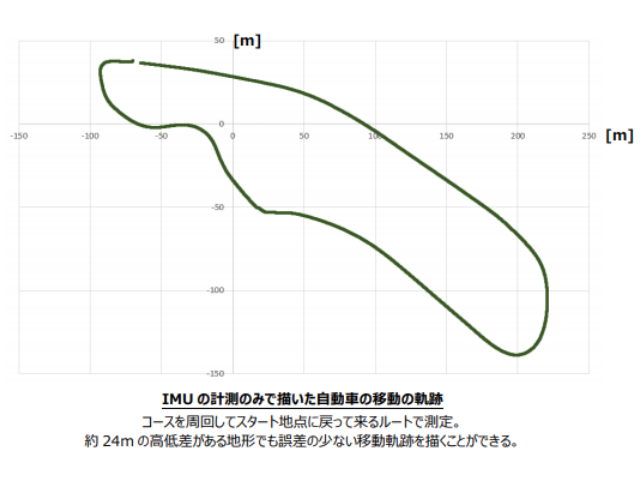
この技術は人に装着したIMUと,自動車に搭載したIMUで計測した加速度データから,それぞれの変位(移動量)を計算し移動軌跡を求め,両データのタイムスタンプを同期させることで両者の位置関係を特定する。
人(歩行者)と自動車の位置関係を約5cmの精度で高頻度(2,000回/秒)に検出することができるため,自動運転/ADAS(先進運転支援システム)の開発・研究への応用が期待できる。また,位置の特定がGPSなどの測位システムに依らないため,建物や樹木などの遮蔽物が多い公道や,屋内でも使用することができる。
さらにこの技術は,他の計測システムのデータを取り込んで同期することもできる。例えばドライバーの視線計測システムと同期することで,ドライバーの視線が歩行者を捉えたタイミング,その時の歩行者と自動車の位置を正確に測定することができる。
また,ペダル操作や操舵など車両の挙動に関するデータと同期することも可能となる。このようにこの技術は,自動車開発における多くの場面での利用が期待されるという。
同社でも,最新の計測機器とこの技術とを組み合わせた新しい自動車計測技術を開発し,製品化していくとしている。