 KDDI総合研究所(KDDI総研)とTelexistence(TX)は,TXが開発する遠隔操作ロボットを対象に,ロボットと操縦者間の映像伝送において,ロボット側のカメラから操縦者側のディスプレーに表示されるまでのEnd-to-End遅延として業界最高水準の50msを実現した(ニュースリリース)。
KDDI総合研究所(KDDI総研)とTelexistence(TX)は,TXが開発する遠隔操作ロボットを対象に,ロボットと操縦者間の映像伝送において,ロボット側のカメラから操縦者側のディスプレーに表示されるまでのEnd-to-End遅延として業界最高水準の50msを実現した(ニュースリリース)。
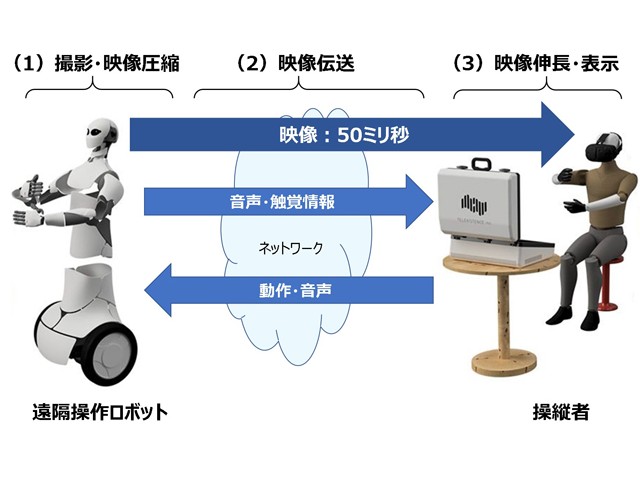
遠隔操作ロボットは,VRグラスを装着した操縦者がロボットから伝送される映像を見ながら操作する。映像伝送に伴うEnd-to-End遅延がおおよそ100msを超えると視覚と操作のずれを大きく感じるため,低遅延化が実用化に向けての課題だった。
映像伝送のEnd-to-End遅延は,大きく3つの要因,(1)ロボット側におけるカメラからの映像取得と映像圧縮,(2)映像データの伝送(ネットワーク遅延も含む),(3)操縦者側における映像伸長と表示,に起因しており,映像伝送システム開発においては,撮影から表示までの,すべてのプロセスにおける徹底的な処理の最適化が重要となっている。
今回,TXの遠隔操作ロボット用映像伝送システムで,KDDI総研の汎用ハードウェアコーデックを用いた映像パラメータや処理フローの最適化技術と,TXのロボット用映像機器の実装・最適化技術により,小型・安価な機器構成で,業界最高水準の50msの超低遅延映像伝送を実現した。
これにより,動きの速い対象物に対して俊敏に反応することができ,より正確な遠隔操作が可能になると共に,従来,映像伝送遅延が原因の一つとされる操縦者のVR酔いが軽減され,より快適に遠隔体験を楽しんだり長時間の遠隔作業を行ったりすることが可能になるという。
KDDI総研とTXは,今回の超低遅延映像伝送技術に関する連携に加え,KDDI総研の画像認識技術をTXのロボットへ応用したロボットビジョン技術においても連携を図り,ロボットや5Gを用いた日常生活やビジネスシーンにおいて,顧客の体験価値を向上する先進的な取り組みを進めていくとしている。